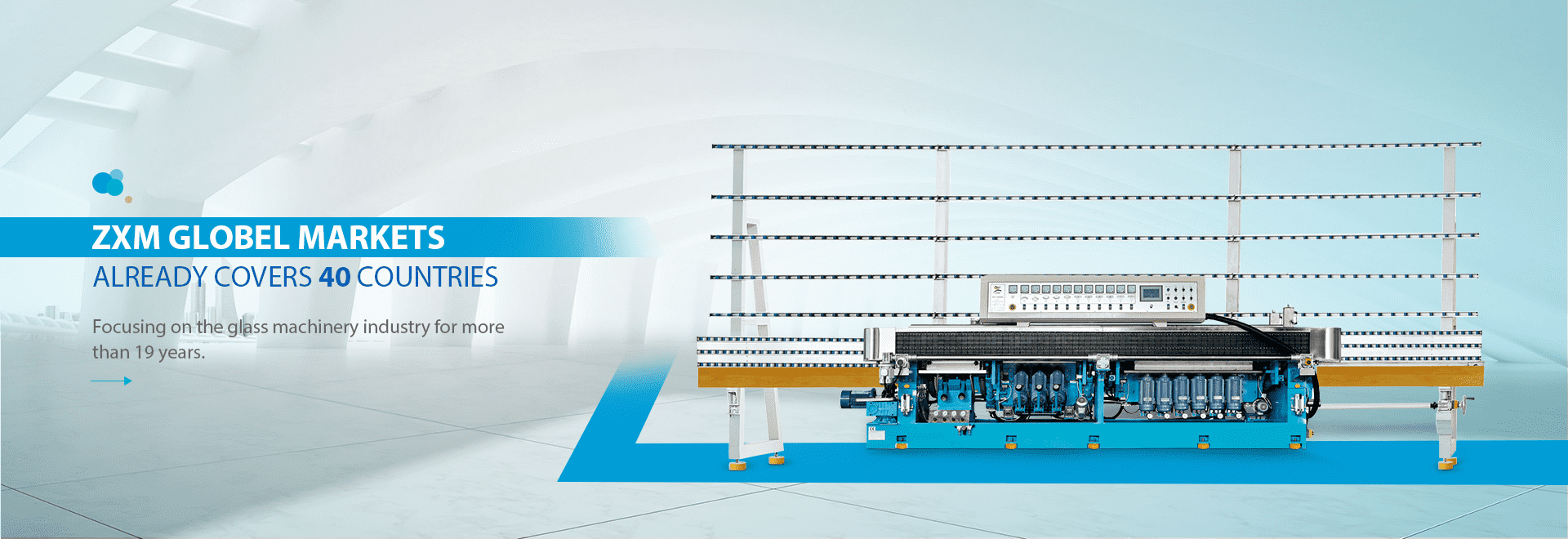

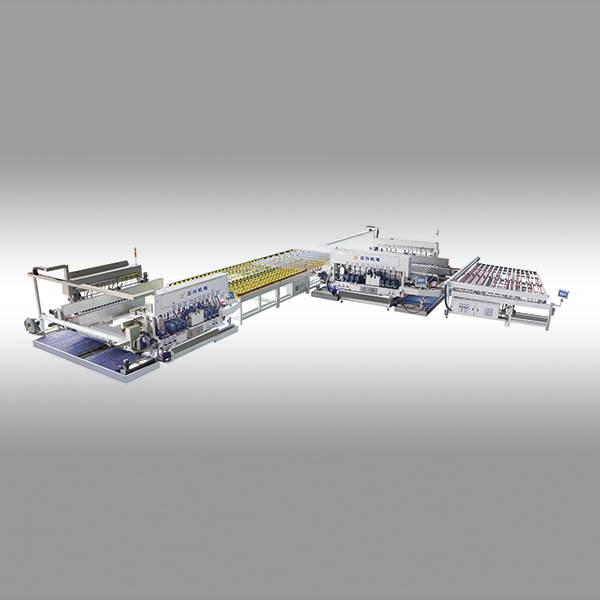
xeta du qat leza bilind qedeh super cam qedand T maseya veguhastinê
FH4225 SM2242GT + ZT4225 + SM2225GTS

Komputer kontrol bikin

Pergala pîvandinê ya servo

pergala sererastkirina firehiyê

Parçeyên elektronîkî yên hêja
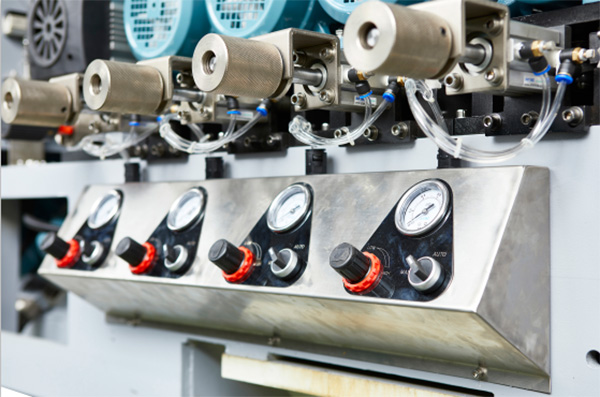
Pergala polînasyona pneumatîk

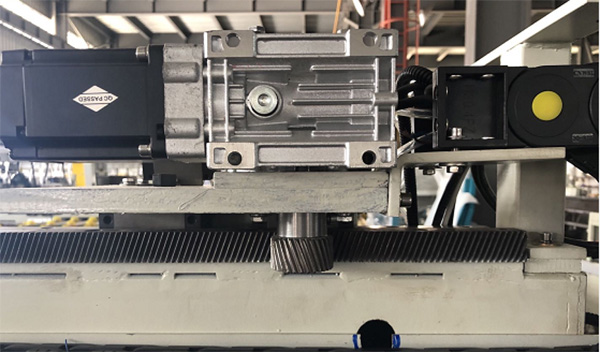
Motora Arris

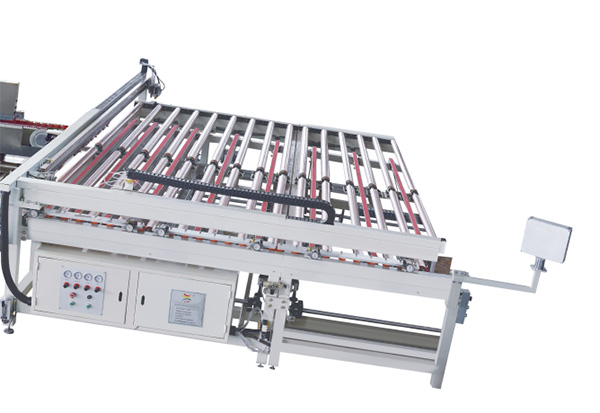
Sifra veguhastina karîgeriya bilind

Sifra veguhastina karîgeriya bilind
Destpêka Makîneyê
Maseya pîvandinê ya cam
Pergala ajotinê
Amûr tê bikar anîn da ku şûşeya ku were xebitandin veguhezîne û bi cî bike, pîvandinek rastîn a dirêjahî, firehî û stûrbûna camê çêbike, û daneyê ji bo pêvekirina piyaleya din jî bişîne grinder-qiraxa û alavên din ên pêvajoyê.
Avakirina masa pîvandina şûşê wekî jêrîn 4 beşan digire nav xwe:
1. Tabloya Positiong
Veguhestina şûşeya ku ber bi pêş an ber bi alî ve diçe ji hêla veguherînerê frekansê ve tê rêve kirin û motora frekansa guhêrbar. Leza veguhastinê dikare were verast kirin. Positioning Precise by sensors-high quality. Dirêjahî, firehî û stûrbûna camê piştî pozîsyona guncan dikare were pîvandin.
2. Amûra pîvandinê
Pîvana dirêjahî û firehiya şûşeyê ji hêla hestiyara ajotina gear a pir pêbawer ve tê pîvandin ji hêla motora servo ve tê ajotin. Pîvana stûrbûna şûşeyê bi zexta bloka naylonê ya bi silindir ve li ser rûyê cam û encodera ku ji hêla gerdûnê ve tê ajotin tête pîvandin. Zexta sîlînderê ji hev cuda tê verast kirin.
3. Pergala kontrola elektrîkê
ECS ji kontrolkerê bernameker (PLC), dîmendera destmêjê (HMI), ajokarê servo, motora servo, veguherînerê frekansê, motora veguherîna frekansê, sansor û hwd pêk tê PLC makîneyê kontrol dike da ku li gorî teknolojiya pêvajoyê bixweber bixebite. HMI peywira têkiliya mirov û komputer temam dike.
4. Sîstema nermalavê
Pergala nermalavê daneyên ji masa pîvandina şûşeyê bi daneya rêzê re dide ber hev, û bixweber bi daneya şûşeya herî nêz re li hev dike. Di vê navberê de, daneya şûşeyê ji bo hilberîna modê an komê ji grinder du qirax û amûrên din ên pêvajoyê re tê veguheztin.
Mîrê operasyonê:
Bi desta an bixweber pelê yek şûşeyê têxin ser masa pîvandina şûşê. Masa pîvandina şûşeyê pîvanên dirêjahî, firehî û stûrbûna cam, radigihîne, helwest û rast bipîve. Daneyên şûşeya pîvandî ji bo berhevdana ku bi daneya rêzê re lihevhatî ye, ji pergala birêvebirinê re tê şandin û ji bo pêvekirina şûşeya pêşerojê ji grinder du qirax û alavên din ên pêvajoyê re tê şandin. Yek pelê şûşê yê din tê danîn ser maseya pîvandinê ya camê û dest bi çerxa xebata din tê.
2. makîneya polîkirina du qiraxa xeta sererast.
No Model: SM2242GT SM2225GTS
Ev makîneyek ji bo polîkirina du keviyên berevajî cam di heman demê de hatiye çêkirin.
a) Kontrolkirin
Vê makîneyê kontrola PLC-ya japonî û navgîniya kargêrê 10 ”qebûl dike. Dîmender her parametreyên berçav ên şûşê nîşan dide. Her makîneyek dikare bi hêla xweya xwe ve were kontrol kirin an jî ji hêla komputerê sereke ve were kontrol kirin.
Mafê bikarhêner dikare wekî kargêr / tamîr / rêveber were rêdikirin, pêşî li xeletiya diqewime, makîneyê ji xelet xebitandinê diparêze.
b) Veguhestina rastbûna bilind.
Her du kemberên demsaziyê yên veguhastin ji hêla du motorên servo ve têne rêve kirin, bi taybetmendiya rastîniya bilind, leza bilind, hevdemkirina bilind.
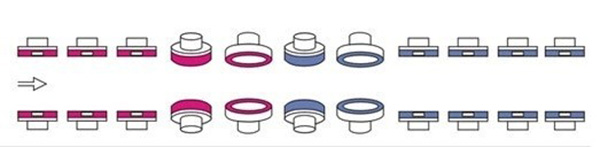
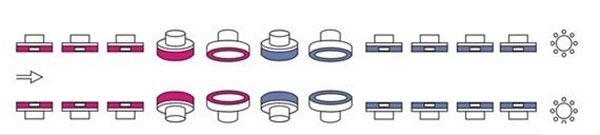
c) Tevgera beşa qirçîna gerok.
Beşa pelçiqandinê ya mobîl li rex rêberê rêgezê hilberandina topa çolî digerin. Veguhestin bi navgîniya kulîlkên topê ve tête meşandin, ku ji hêla motora servo ve tê ajotin, Leza tevgera Max a beşa grindê dikare di deqîqeyê de bigihêje 15 metre. Di heman demê de di vê pergalê de pergala şikestin û girtinê jî heye, ku dikare tevgera stabîl a beşa birrînê, hêza bandora kêm garantî bike. Ev avahî dikare aramiya hêza girtinê ya ji bo şûşeyek mezin piştrast bike, tewra piştî ku makîne demek dirêj xebitî.
d) Her kevirek du qat xwediyê yeka pişgiriya navîn a otoamtîk e, ku digel beşa grinidng a gerguhêz diçin, ku ji pozîsyona navîn piştevaniya şûşeyê dikin da ku şûşe neşewite. Ji bo edgerek du qat a pir mezin, em di heman demê de rêgezek din a piştgiriyê ya veguhêzbar jî peyda dikin, ku dikare bi destan hewce bike.
e) Pergala şopandina jorîn & daketinê bêyî pirsgirêka asê ya ku pergala kevneşopa kevneşopî ya kevneşopî bikar tîne, avahiya plakaya şemitok bikar tîne
f) Pergala pozîsyonê.
Pergala pozîsyona barkirina şûşeyê çar beşan digire nav xwe: Rolikên sabit, pergala girtina hewayê ya tevgerbar, lihevnêzîkkirina blokan (yek çep û yek rast), Rollerên topavêjkirina hewa yên jor (yek çep û yek rast). Glassûşe ji hêla pergala pozîsyonê ve bi teqezî li hevûdu tê û tê teng kirin. Vê pergalê bandora rastîn û pîvandinê ya hûrkirî garantî dike.
g) Lihevanîna hêsan
Bilindkirin / daketina pergala şopandina jorîn û motorên arrisa jorîn ji hêla motorê ve têne rêve kirin. Ew dikare bixweber li gorî sturiya camê ya cuda were saz kirin.
h) Pergala Polishing Air.
The wheel Polishing ji hêla hewayê ve tê xebitandin, ku ji hêla PLC û valvaya elektromanyetîkî ve tê kontrol kirin, ku dikare li gorî pozîsyona camê pêş / paş here. Vê pergalê dikare bixweber lêdana tekerên tezmînat bike, zexta domdar bide cam û encama heman zincîreyê bistîne.
Pergala tevgera motora polishing bikar tîne pergala hesinî ya şemitokî ya rastdar a dural.
i) Bodrum û çarçove:
Ji polayê çêkirî yê stûr hatine çêkirin, ku di kargeha me de bi sobeya pijandinê tê derman kirin. Bi aramiya baş û hêza dij-torsyon, hêza dij-bend.
j) Motor
Motora frekansa guhêrbar a rastbûna mezin, lerza kêm bikar bînin. Leza motors dikare bi veguherîna frekansê re bibe 4300RPM, leza xebitandina makîneyê dikare heya 20 metre / hûrdem zêde bibe.
Pergala kontrola motorê fonksiyona parastinê ya zêde / kêmbûna qonax / girêdana kurt heye, perçên elektronîkî marqeya navneteweyî bikar tînin, celebên standard, bi hêsanî di sûkê de têne dîtin, ku lêçûna lênihêrîna xerîdar kêm dikin, karîgeriya hilberînê zêde dikin.
k) Top / Jêr Conveyor Veguhestin qayişên demjimêrî bipejirînin.
l) Lubrifasyon:
Rîçikên teker û rêberên rêber ên bi pompeya rûnê otomatîk têne lubrifandin.
Di heman demê de mekîneyek pompeya rûnê desta jî, ku rûyê şemitandinê lubrifîne, amade kir.
mê) Verastkirina leza xebatê: Bi riya veguherînerê frekansê.
n) Tanka avê, tepsiya avê, jor / binê berika kemberê ya demjimêr, rahînerên rêber ên rêsîner / pêçikên kulîlkên kulikê di polayê zengarnegir de têne çêkirin.
o) Meter Amperometer:
mezinahiya tekerê kontrol bikin.
Wêneyên bêtir agahdarî.
Corner birrîn motor
Veguheztin-nermalav sêwirana moduleya pêwendiya avê nîşana têgihîştî ji bo ampermetera motora jor û jêrîn.
3. L- teşe Veguhestina maseyê. Sifra Roller û kembera demjimêrê.
Ev makîneya hanê ji pergala veguhastina roller û pergala veguhastina kembera demjimêrê pêk tê. Pergala veguhastina roller ji hêla zincîran ve tête rêve kirin, lezgîn bi hêla veguherînerê ve bi leza mîhengê ve tête kontrol kirin.
Pergala veguhastina kembera demjimêr dikare were jor û jor. Gava ku cam ji pêşîn du qolikê dertê, dê pergala kembera demjimêrê were rakirin. Dê cam li pozîtona rast were veguhastin û dûv re li ser pergala veguhastina roller were daxistin.
Pergala veguhastina kembera demjimêr laşê profîla alumînyûmê bikar tîne.
Parametreyên teknîkî
Leza hilberînê
| Şanî | Qalindahiya camê | Max. leza xebitandinê | Glass Dawî |
|
1 |
4 - 6 mm | 22 m / min | Rindkirina dijwar |
|
2 |
8 -10 mm | 18 m / min | Rindkirina dijwar |
|
3 |
12 - 15 mm | 15 m / min | Rindkirina dijwar |
|
4 |
4 - 6 mm | 16 m / min | Polining fine |
|
5 |
8 -10 mm | 14 m / min | Polining fine |
|
6 |
12 - 15 mm | 12 m / min | Polining fine |
Paqijiya xebitandinê:
| Şanî | Terîf | Tamî Çîyarêz |
|
1 |
Rastbûna rêza diagonal | 0.5mm / m |
|
2 |
Rastbûna paralel | ≤0.2mm / m |
|
3 |
Pîvana pîvana Arris | ≤0.2mm / m |
|
Şanî |
Parametre | Çîyarêz |
|
1 |
Max. mezinahiya camê | 4200x2500 mm |
|
2 |
Min mezinahiya camê | 350 x 350 mm ger edge du qulikê bêyî pişka navîn400 x 400 mm line xeta tevahî |
|
3 |
Qalindahiya camê | 3 - 28 mm |
|
4 |
Firehiya Arris: | 1 - 3 mm |
|
5 |
Kûrahiya dirûnê | 3 mm (aliyek yekbûyî) |
|
7 |
Leza sererastkirina firehiyê | 1 - 15 m / min |
|
8 |
Zexta hewayê ya xebatê | 0,7 MPa |
| Bilindahiya xebatê: | 920 - 960 mm | |
|
9 |
Hêza temam | Li dora 135 KW / 380V 50Hz 3P |